
 [Null space control] Nullspace에 대하여
[Null space control] Nullspace에 대하여
Null space control을 다루기 전에 먼저 Null space 에 대해서 이야기해보자. 기존에 작성해둔 Null space 설명을 가져왔다. "널 스페이스는 컬럼 스페이스와는 전혀 다른 Subspace이다. 선형 방정식 AX=b에서 b가 zero vector일때 즉 AX=0일때 모든 가능한 해 X에 대한 집합이다. 특정 행렬A와 X가 곱해졌는데 그게 0이 나올때 X의 집합, x가 이루는 공간을 Null space라고 한다. 3차원 공간에서 Null space는 직선으로 표현된다고 한다." 쉽게 말해 AX = 0 일 때 가능한 모든 해 X의 집합이 Null space 라고 볼 수 있다. 직관적인 이해를 위해 아래 영상을 참고하자. https://www.youtube.com/watch?..
 [임피던스 제어] Interaction Control 적용 - Virtual Trajectory & nodic impedance
[임피던스 제어] Interaction Control 적용 - Virtual Trajectory & nodic impedance
여느 다른 컨트롤 시스템처럼, 상호작용 시스템도 안정성과 성능 두마리의 토끼를 잡아야한다. 이전 글에서는 안정성 분석이 반드시 시스템 상호작용 할 환경에 대한 고려를 포함 해야 한다는 것을 보였고, 시스템의 port behavior를 조작함으로서 안정성의 원칙이 보장 될 수 있음도 보였다. (물론 블로그 글에는 정리하지 않았다. 너무 복잡해서..) 상호작용 시스템의 성능도 dynamic port behavior로 측정 되므로, 두가지 목적(안정성과 성능)는 target interactive behavior의 구현에서 오류를 최소화 하는 컨트롤러로 동시에 충족될 수 있다. 즉, 어떤 target 상호작용하는 움직임이 있는데, 이에서 오류를 최소화하는 컨트롤러로 안정성과 성능이라는 두마리 토끼를 잡을 수..
 [강화학습] Markov Decision Processes(2)
[강화학습] Markov Decision Processes(2)
반년전에 공부하면서 정리한 강화학습 내용을 다시 복습할 겸 올리는 중입니다.팡요랩 유튜브 영상을 보며 정리한 내용이며, 분명히 틀린 내용이 많으니 만약 보시는 분들은 참고용으로만 보시면 좋을 것 같습니다. 팡요랩 유튜브 영상 : https://www.youtube.com/watch?v=NMesGSXr8H4 강의 자료 (David silver) : https://www.davidsilver.uk/wp-content/uploads/2020/03/MDP.pdf Policies policy pi는 주어진 state에서의 action을 이야기 한다. policy는 agent의 행동을 지정하는데, MDP에서의 Policy는 현재 state와 관련이 있지만 History와는 관련이 없다. 즉, policy는 시간과..
 [강화학습] Markov Decision Processes(1)
[강화학습] Markov Decision Processes(1)
반년전에 공부하면서 노션에 정리한 강화학습 내용을 다시 복습할 겸 올리는 중입니다. 팡요랩 유튜브 영상을 보며 정리한 내용이며, 분명히 틀린 내용이 많으니 만약 보시는 분들은 참고용으로만 보시면 좋을 것 같습니다. 강화학습이지만 귀찮으니깐 제어 카테고리에 넣겠습니다. 팡요랩 유튜브 영상 : https://www.youtube.com/watch?v=NMesGSXr8H4 강의 자료 (David silver) : https://www.davidsilver.uk/wp-content/uploads/2020/03/MDP.pdf Markov Decision Processes MDP는 RL에서 주어지는 환경을 이야기한다. 이때 환경은 관찰할 수 있으며, MDP는 RL에서 주어지는 환경을 이야기한다. 이때 환경은 관찰할..
 [임피던스 제어] Coupled Systems 분석
[임피던스 제어] Coupled Systems 분석
상호작용 포트로 결합(coupled)된 시스템을 분석하기 위해서는 상호작용하는 행동의 causality를 확인하면 좋다. causality란 시스템의 출력값이 과거와 현재 입력값에만 영향을 받는지에 대한 내용이다. 각 시스템에 적당한 causality는 시스템과 환경과의 연결 관계에 제한되며 이는 시스템의 수학적 표현에 영향을 준다. power-based network 모델링 접근법(bond graphs)이 유용하지만, 사실 그렇게 꼭 필요한건 아니니 참고만 하자.(보니깐 필요한 것 같다. 추후에 Bond graph에 대한 것도 정리해보겠다) https://en.wikipedia.org/wiki/Bond_graph Bond graph - Wikipedia en.wikipedia.org Causal Ana..
 [임피던스 제어] Port Behavior과 Transer function(전달함수)
[임피던스 제어] Port Behavior과 Transer function(전달함수)
포트 임피던스와 어드미턴스는 선형시스템 반응 표현들이다. 일반적인 입력, 출력값으로 표현되는 전달함수와 다른점(차이점)을 알아두는 것이 좋다. 그림의 시스템의 경우 2개의 power interface가 있기 때문에 2-port 예제로 볼 수 있다. 첫번째 power interface는 Fa와 x1속도로 표현할 수 있고 두번째 power interface의 경우 Fe와 x2의 속도로 표현 가능하다. 만약 위 사진과 같은 요소들이 로봇을 표현한다면, 한쪽은 주로 액추에이터와 연결되어 있고 다른 한쪽은 로봇의 아래쪽이나, 바로 환경과 연결되어 있다. 기계적 2-port는 모션에 따른 힘에 대한 4가지의 전달함수를 가지게 된다. 그 중 2개는 아래와 같다. 이들은 입력과 출력의 전달함수로 다른 power 변..
 [임피던스 제어] 기계적 임피던스와 어드미턴스
[임피던스 제어] 기계적 임피던스와 어드미턴스
기계적 임피던스와 어드미턴스 상호작용 컨트롤의 일반적인 형태는 매니퓰레이터의 임피던스나 어드미턴스를 조절하는 것이다. 힘을 전압이라고 보고 전류를 속도라고 보게 되면 기계적인 임피던스는 전기적 임피던스와 동일하게 볼 수 있고, 전력의 흐름을 정의하는 변수들의 결합으로 특정지어 진다. 이는 아래의 내용으로 정의 된다. 정의1. 포트에서의 기계적인 임피던스는 동일한 포트에서 시간에 대한 속도(velocity, angular velocity) 함수를 Input으로 가지고, 시간에 대한 힘(force, Torque)을 output으로 만드는 동적 연사자이다. 이를 Z 라고 두자. 그리고 포트에서 기계적인 임피던스는 동일한 포트에서 시간에 대한 함수 힘을 input으로 가지고, 속도를 시간에 대한 함수로 ou..
 [임피던스 제어] 상호작용 컨트롤(1)
[임피던스 제어] 상호작용 컨트롤(1)
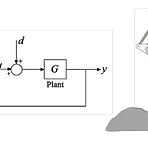
외란억제로서 상호작용 (Interaction as Disturbance Rejection) 다양한 제어이론들이 특징이 잘 설명되어 있지 않은 인터페이스를 다룰 수 있도록 발전해왔다. 외란 억제 방법을 통해서 환경에 대한 다이나믹스가 외란힘으로 추가될 수 있다. 억제를 잘하기 위해서는 외란 힘의 경계값을 잘 정해줘야한다. 하지만 로봇이 환경과 상호작용하는 경우에 외란힘은 로봇의 수용량을 넘거나 동일한 경우가 대부분이다. 예를 들어 운동학적(Kinematic) 제약은 로봇의 행동에 따라 큰 힘을 만들 수 있는데, 외란힘(환경이 주는 힘)은 로봇의 상태와 연관이 있는 데 일반적으로 외란은 상태와 독립적으로 보기 때문에 상호작용을 외란억제 문제로 보는 것은 그렇게 좋지는 않다(not seem promising)..