
 [임피던스 제어] Direct Impedance Modulation
[임피던스 제어] Direct Impedance Modulation
임피던스 제어가 원시적이어도 간단한 임피던스 컨트롤은 안정성 문제를 해결하는 데 크게 도움이 된다. 또한 내재한 로봇의 임피던스가 줄어들 경우 컨트롤러의 성능 또한 좋아진다. 임피던스 컨트롤 적용은 몇몇 환경에서 잘 작동하지만 분명히 한계점은 존재한다. discrete-time 컨트롤러 구현과 모델링 되지 않은 actuator와 sensor들의 관계 같은 요소들이 컨트롤러의임피던스를 능동적으로 만든다. 이런 복잡한 기하학적 구조에서 안정성은 보장될 수 없다. 하지만 임피던스 컨트롤은 back-drivable design과 같이 사용 됐을 때 성공적인 성능을 보여주었다. https://www.youtube.com/watch?v=IxRg7iSvkkc Back Drivable에 대한 참고자료 Dircet Im..
 [임피던스 제어] Interaction Control 적용 - Virtual Trajectory & nodic impedance
[임피던스 제어] Interaction Control 적용 - Virtual Trajectory & nodic impedance
여느 다른 컨트롤 시스템처럼, 상호작용 시스템도 안정성과 성능 두마리의 토끼를 잡아야한다. 이전 글에서는 안정성 분석이 반드시 시스템 상호작용 할 환경에 대한 고려를 포함 해야 한다는 것을 보였고, 시스템의 port behavior를 조작함으로서 안정성의 원칙이 보장 될 수 있음도 보였다. (물론 블로그 글에는 정리하지 않았다. 너무 복잡해서..) 상호작용 시스템의 성능도 dynamic port behavior로 측정 되므로, 두가지 목적(안정성과 성능)는 target interactive behavior의 구현에서 오류를 최소화 하는 컨트롤러로 동시에 충족될 수 있다. 즉, 어떤 target 상호작용하는 움직임이 있는데, 이에서 오류를 최소화하는 컨트롤러로 안정성과 성능이라는 두마리 토끼를 잡을 수..
 [임피던스 제어] 상호작용 컨트롤(1)
[임피던스 제어] 상호작용 컨트롤(1)
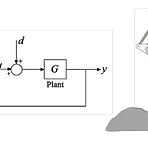
외란억제로서 상호작용 (Interaction as Disturbance Rejection) 다양한 제어이론들이 특징이 잘 설명되어 있지 않은 인터페이스를 다룰 수 있도록 발전해왔다. 외란 억제 방법을 통해서 환경에 대한 다이나믹스가 외란힘으로 추가될 수 있다. 억제를 잘하기 위해서는 외란 힘의 경계값을 잘 정해줘야한다. 하지만 로봇이 환경과 상호작용하는 경우에 외란힘은 로봇의 수용량을 넘거나 동일한 경우가 대부분이다. 예를 들어 운동학적(Kinematic) 제약은 로봇의 행동에 따라 큰 힘을 만들 수 있는데, 외란힘(환경이 주는 힘)은 로봇의 상태와 연관이 있는 데 일반적으로 외란은 상태와 독립적으로 보기 때문에 상호작용을 외란억제 문제로 보는 것은 그렇게 좋지는 않다(not seem promising)..