
티스토리 뷰
임피던스 제어가 원시적이어도 간단한 임피던스 컨트롤은 안정성 문제를 해결하는 데 크게 도움이 된다.
또한 내재한 로봇의 임피던스가 줄어들 경우 컨트롤러의 성능 또한 좋아진다. 임피던스 컨트롤 적용은 몇몇 환경에서 잘 작동하지만 분명히 한계점은 존재한다. discrete-time 컨트롤러 구현과 모델링 되지 않은 actuator와 sensor들의 관계 같은 요소들이 컨트롤러의임피던스를 능동적으로 만든다. 이런 복잡한 기하학적 구조에서 안정성은 보장될 수 없다. 하지만 임피던스 컨트롤은 back-drivable design과 같이 사용 됐을 때 성공적인 성능을 보여주었다.
https://www.youtube.com/watch?v=IxRg7iSvkkc
Dircet Impedance Modulation
이번 글에서는 로봇의 본질적인 임피던스를 줄이는 방법에 대해서 이야기해보려 한다.
상호작용 컨트롤을 피드백 없이 구현하기 위한 상호보안적인 방법은 임피던스를 직접적으로 바꿔주는(Modulate) 방법이 있다.
예를 들어서 상호작용 하는 포트(Interaction-port) 관성의 피드백 제어는 매우 어려울 수 있는데, 로봇 매커니즘의 운동학적 중복성의 이점을 이용하여 분명한 이노시아 값을 바꿀 수 있다.
예를 들어서 인체 근육계를 들어보자. 이노시아 값을 포함한 모든 기계적 임피던스는 인체의 어느 부분을 상호작용 포트로 사용하는지에 따라서 변하게 된다. 손 끝이 살짝 구부러진 상태에서는 환경에 대한 기계적 임피던스는 매우 낮아진다. 반대로 팔꿈치가 쫙 펴져 있을 경우 손과 어깨로 가는 라인에서의 팔의 임피던스는 높아진다.

메카니컬한 임피던스를 바꿔주는 방법의 대안으로 여(redundancies) 엑추에이터의 이점을 사용하면 된다. 다시 근육으로 돌아와서, 근육은 당기기만 하고 밀지는 않기 때문에 관절 기준으로 반대방향(양쪽으로 있다는 뜻인 듯)으로 한개씩 존재한다. 그래야 양방향의 토크가 생성될 수 있기 때문이다. 결론적으로 근육은 몸의 자유도보다 많이 존재한다.(여자유도 혹은 여엑추에이션이 있다고 생각하면 된다.)
신기한 점은 포유류의 근육으로 만들어지는 힘은 근육의 길이와 그 변화율에 따라 변한다는 것이다. 감쇠된 스프링과 비슷하게 매커니컬한 임피던스를 가지게 되는데, 이런 매커니컬한 임피던스는 근육의 움직임에 따라 증가한다. 물론 근육 마다 만드는 힘이 서로 상충할 수 잇지만, 임피던스에 대한 근육의 기여는 항상 관절 임피던스에 더해진다. 따라서 관절의 임피던스는 반대쪽 근육을 당기면서 자세를 조절하지 않아도 직접적으로 조절이 가능하다(?) 예를 들어서 물건을 잡은 상태에서 꽉 쥐기 위해서는 단순히 squeez하기만 하면 된다. 이렇게 꽉 쥐는 작업은 툴에 대한 net force나 토크를 변화시키지 않고 단순히 반대쪽 근육을 활성화 시키는 것만으로도 가능하다. 물건과 상호작용하는 손의 기계적 임피던스만 변화하면 손에 대한 물건의 위치를 안정화 할 수 있다 (안정적으로 물건을 꽉 쥘 수 있다는 뜻)
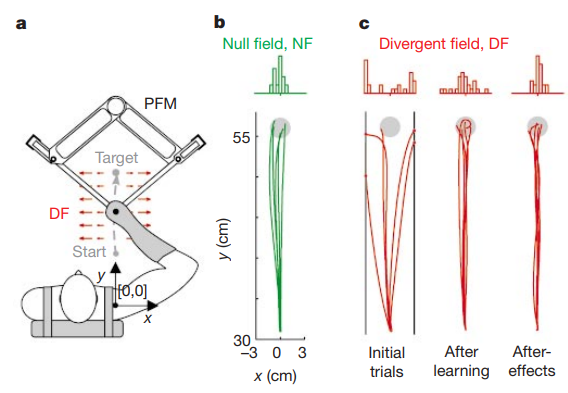
의지에 의해서 근육을 당기면서 신경근육의 기계적 임피던스를 변화 시킬 수 있는 사람의 능력은 종종 관찰되는데, 사람의 기계적 임피던스 컨트롤은 매우 정교하고 선택적이다. 예를 들어서 움직이는 방향으로는 안정적인 임피던스를 만들고, Normal 방향으로는 불안정한 임피던스를 만드는 로봇을 사람이 잡고 움직이는 경우에, 사람은 우선적으로 Normal 방향으로 임피던스를 높이는 형태로 팔을 움직였다고 한다.
이와 비슷하게 직접적인 액추에이터의 임피던스 변화가 로봇 시스템에도 적용될 수 있다. 다양한 방법으로 적용할 수 있는데, 예를 들어서 기압으로 움직이는 액추에이터를 스프링 처럼 적용하여, 압력을 높이는 것으로 당연하게 강성을 높일 수 있다. 그 외에도 유압으로 뎀핑을 만든다거나 전자석 액추에이터등을 사용하는 방법도 있다.
'미니멀공대생 > Control' 카테고리의 다른 글
| [Null space control] redundant manipulator control with optimal target function (0) | 2021.09.22 |
|---|---|
| [Null space control] Null space Projection for redundant manipulator (1) | 2021.09.15 |
| Multiobjective Optimization for stiffness and position control in a soft robot arm module (4) | 2021.07.26 |
| [강화학습] Dynamic programming (0) | 2021.06.04 |
| [임피던스 제어] "Simple" Impedance Control (2) | 2021.05.22 |