
티스토리 뷰
미니멀공대생/Control
[Null space control] redundant manipulator control with optimal target function
미니멀공대생 2021. 9. 22. 18:35
간단한 Null space control 문제를 풀어보자.
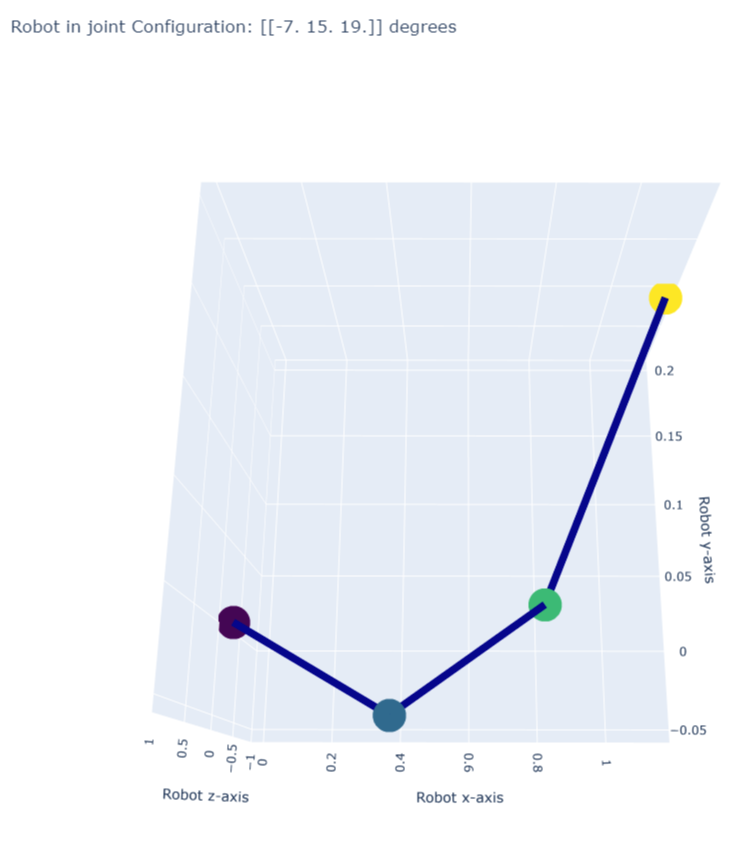
Task space가 2차원으로 주어진 경우에서 3자유도를 가진 로봇을 움직일 때를 생각해보자.
로봇팔의 자유도보다 Task space가 작기 때문에 redundant라고 볼 수 있으며, 여자유도가 남아 Null space control이 가능해진다.
간단하게 1번,2번 조인트를 최소로 움직이도록 하는 Target function을 정해보자.

앞선 글에서 말한 Target function이 추가된 pseudo inverse 식은 아래와 같아진다.


위 식을 풀어서 로봇 팔을 움직이게 되면 Target function을 optimal하게 풀게 되며, 이는 일반적인 pseudo inverse kinematic을 풀어서 움직인 로봇 팔과 비교했을 때 확실히 1번, 2번 조인트의 움직임이 적은 걸 볼 수 있다.
'미니멀공대생 > Control' 카테고리의 다른 글
| [임피던스 제어] Improving Low-Impedance Performance (Series Dynamics) (0) | 2022.01.05 |
|---|---|
| [임피던스 제어] Improving Low-Impedance Performance (2) | 2021.12.24 |
| [Null space control] Null space Projection for redundant manipulator (1) | 2021.09.15 |
| [임피던스 제어] Direct Impedance Modulation (2) | 2021.08.23 |
| Multiobjective Optimization for stiffness and position control in a soft robot arm module (4) | 2021.07.26 |
댓글