
 NVIDIA Jeston 환경 셋팅 1-1편 (JetPack 설치 On AGX Xavier)
NVIDIA Jeston 환경 셋팅 1-1편 (JetPack 설치 On AGX Xavier)
작성자 : 한양대학원 융합로봇시스템학과 유승환 석사과정 (CAI LAB) 오늘은 NVIDIA Jeston 환경 셋팅으로 AGX Xavier에 JetPack 설치를 해보겠습니다! NVIDIA Jeston Xavier은 GPU가 장착된 소형 컴퓨터, JetPack은 Jeston 전용 OS(GPU 연산을 위한 CUDA 등의 라이브러리들이 베이스로 설치된 Ubuntu) 생각하시면 됩니다. 그러면 시작해보겠습니다~! 참고 링크 0 : medium.com/coredottoday/nvidia-jetson-agx-xavier-%EC%86%8C%EA%B0%9C-%EB%B0%8F-%EC%84%A4%EC%A0%95-%EB%B0%A9%EB%B2%95-f9c00f669680 NVIDIA JETSON AGX XAVIER 소개 및..
보호되어 있는 글입니다.
보호되어 있는 글입니다.
목차 1. RTOS? [진행중] 2. Micro-ROS? [x] 3. Micro-ROS 예제 [x] 4. Micro-ROS를 통한 모터 제어 [x] 임베디드 임베디드 운영체제 단순한 절차적 작업 수행 8비트, 16비트 마이크로 컨트롤러 및 마이크로 프로세스 사용. 임베디드 리눅스 저성능 마이크로 프로세스, 한정된 메모리 환경을 위한 리눅스 장점 높은 확장성 다양한 cPU지원 단점 RTOS에 비해 많은 메모리 요구 범용 OS로서, 리얼타임 지원 X RTOS? Real-Time Operating System 어떤 Task 정해진 시간 안에 처리해야할 때, 사용하는 운영체제로, 즉 실시간 처리를 보장해주는 OS 일반적 OS와의 차이점으로 RTOS는 효율성, 시간 제약(속도), Fairness가 특징 보다 시간..
 YOLO V5 환경 셋팅 및 모델 아키텍쳐 분석하기
YOLO V5 환경 셋팅 및 모델 아키텍쳐 분석하기
작성자 : 한양대학원 융합로봇시스템학과 유승환 석사과정 (CAI LAB) 오늘은 YOLO V5 (Pytorch) 환경 셋팅 및 모델 아키텍쳐(Backbone, Head) 분석을 하겠습니다. 그럼 YOLO v5 분석 시작~!! 링크 0) YOLO v5 Pytorch 깃헙 링크 : https://github.com/ultralytics/yolov5 ultralytics/yolov5 YOLOv5 in PyTorch > ONNX > CoreML > iOS. Contribute to ultralytics/yolov5 development by creating an account on GitHub. github.com 링크 1) YOLO v5 custom train 예제 링크 : https://github.com/..
 YOLOv3 : An Incremental Improvement 리뷰
YOLOv3 : An Incremental Improvement 리뷰
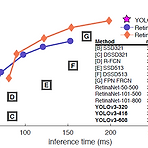
작성자 : 한양대학원 융합로봇시스템학과 유승환 석사과정 (CAI LAB) 오랜만에 딥러닝 관련 논문 리뷰를 합니다ㅎㅎ 오늘은 Object Detection에서 유명한 YOLO의 version 3를 리뷰해보겠습니다! YOLOv3는 아카이브 기준 2018년 8월에 나왔으며, Object Detection의 교제 같은 베이스 알고리즘이죠! 그럼 리뷰 시작합니다~!링크 0 (원문) : https://arxiv.org/pdf/1804.02767.pdf 링크 1 (참고 블로그) : https://taeu.github.io/paper/deeplearning-paper-yolov3/ [논문] YOLOv3: An Incremental Improvement 분석YOLOv3: An Incremental Improvemen..
 ROS2 foxy 튜토리얼3 - ROS2 노드(node) 이해하기
ROS2 foxy 튜토리얼3 - ROS2 노드(node) 이해하기
그동안은 ROS2의 학습용 패키지인 turtlesim 패키지만을 돌려봤습니다. 이번 차 부터는 그 것들이 어떻게 돌아가는 지 내부를 알아보면서 다시 한 번 학습을 해 보겠습니다. 오늘은 노드(node)에 대해 알아보겠습니다. 노드는 ROS2 시스템에서 가장 기본적인 실행 단위를 의미하고, 로봇시스템의 기능 하나하나를 노드로 만들어서 전체 시스템을 돌리게 된다고 생각하면 됩니다. 이전 튜토리얼: ROS2 foxy 튜토리얼2 - turtlesim과 rqt 1. ROS 그래프 ROS 시스템에서 가장 중요한 역할 중 하나는 유저들이 개발한 기능들간의 통신입니다. 그리고 각 기능들은 노드로 구현되는데 이 노드간의 통신과 노드의 집합을 그래프라고 일컫습니다. 2. ROS2에서의 노드 앞서 말했든 노드는 하나의 기능..
 ROS2 foxy 튜토리얼2 - turtlesim과 rqt
ROS2 foxy 튜토리얼2 - turtlesim과 rqt
ROS2를 처음 학습할 때 가장 먼저 돌려볼 프로그램이 turtlesim 입니다. 앞으로 turtlesim이 어떻게 돌아가는 지 확인해 보면서 ROS2의 필수 요소들을 이해해 보도록 합니다. 또한 rqt는 ROS2의 GUI툴 중 하나로 ROS1 때와 마찬가지로 중요한 역할을 해줄 녀석입니다. ROS2에서는 좀 더 유저 친화적으로 나왔다고하니 기대해 보도록 하겠습니다. 오늘은 turtlesim을 통해 node를 실행하는 방법을 알아보겠습니다. 이전 튜토리얼: ROS2 foxy 튜토리얼1 - 설치 및 설정 1. turtlesim 설치 sudo apt update sudo apt install ros-foxy-turtlesim 제대로 깔렸는지 확인해줍니다. ros2 pkg executables turtlesi..