
티스토리 뷰
Mobile manipulator 101 :: Combined Jacobian & Dual trajectory
미니멀공대생 2022. 10. 3. 16:49참고한 모든 Paper는 아래 링크에 있습니다. 도움이 되셨다면 Star를 눌러주세요 ㅎ
GitHub - benthebear93/awesome-mobile-manipulator: Reading List and related repos for mobile manipulator
Reading List and related repos for mobile manipulator - GitHub - benthebear93/awesome-mobile-manipulator: Reading List and related repos for mobile manipulator
github.com
해당 글은 아래 논문을 정리한 내용입니다.
참고 논문 : Kinematic Control of Redundant Mobile Manipulators by Mashali, Mustafa
기본적으로 매니퓰레이터에서의 자코비안은 Task space와 Joint space에서의 속도와 각속도간의 관계를 매핑해주는 함수이다.
따라서 모바일 매니퓰레이터가 됐다고 해서 자코비안의 근본 자체가 바뀌는 것은 아니다. 단순히 추가된 여자유도에 대한 표현을 해줄 수 있는 형태가 되면 된다.
기존 글에서는 Arm 기준에서의 EE의 표현, Platform 기준에서의 EE의 표현에 대해 정리했다.
기준을 통일 하기 위해서 자코비안식을 하나의 행렬 형태로 표현해줄 필요가 있다. 이를 Combined Jacobian이라 한다.
이전 식들을 정리해서 하나의 식을 유도해보자.
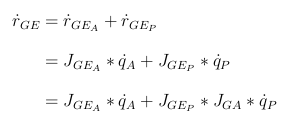
식이 뜻하는 것은, Arm 기준에서 표현 된 Global 기준, EE의 속도 벡터와 Platform기준에서 표현 된 GLobal 기준 EE의 속도 벡터를 더하는 것이다.각각을 더해서 최종적으로 Global기준 EE의 속도 벡터를 나타낸다.
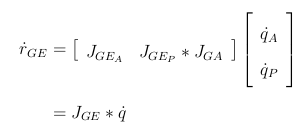
최종식은 두개의 자코비안이 하나의 행렬의 형태로 나타내진 형태가 된다.
EE의 Cartesian 속도와 Arm의 Joint 속도 + Mobile Platform의 Joint 속도의 관계를 표현해주는 Combined Jacobian을 확인할 수 있다.
논문에서는 제어 해(Solution)의 안정도를 위해서 모바일 Platform의 선속도를 각속도의 형태로 변경해야 한다고 한다.
(관련 논문 : maximizing manipulation capabilities of persons with disabilities using a smart 9-degree-of-freedom wheelchair-mounted robotic arm system)

최종적으로 Arm과 Mobile Platform을 위한 Dual Trajectort Controller의 근간이 되는 식을 정의하자.
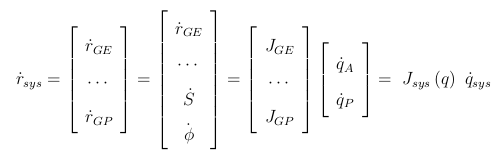
Global frame에 대한 EE의 자코비안은 위에서 많이 확인 했지만, Global frame에 대한 Mobile Platform의 자코비안에 대해서는 이야기할 필요가 있다. 이 부분만 식을 따로 정리해보면

여기서 실제 Arm Joint의 각속도는 Mobile Platform에 영향을 주지 않기 때문에 자코비안이 간단해진다.

기본적인 Kinematics에 대한 내용은 여기까지다.
Arm과 Mobile에 대한 자코비안을 하나의 자코비안으로 합쳐서 표현하는 것이 주된 내용이었다.
다음 글에서는 Mobile manipulator의 Kinematic Control에 대해서 정리해보겠다.
'미니멀공대생 > Control' 카테고리의 다른 글
| [논문리뷰] A fast, iterative solver for the Inverse Kinematcis Problem (0) | 2022.10.10 |
|---|---|
| Mobile Manipulator 101 :: Pseudo-Inverse and Singularity-Robust Inverse (0) | 2022.10.05 |
| Mobile manipulator 101 :: Basic Kinematics (1) | 2022.10.01 |
| [논문리뷰] Robot Sensor Calibration : Solving AX=XB on the Euclidean Group (4) | 2022.07.23 |
| MIT 6.800/6.843 Robotics Manipulation :: Introduction (1) | 2022.06.21 |