
 [논문리뷰] Skill Transfer for Surface Finishing Tasks Based on Estimation of Key Parameters
[논문리뷰] Skill Transfer for Surface Finishing Tasks Based on Estimation of Key Parameters
Skill Transfer for Surface Finishing Tasks Based on Estimation of Key Parameters 저자 : Yitaek Kim, Christoffer Sloth and Aljaz Kramberger 논문 : https://ieeexplore.ieee.org/document/9926698/ 작성 : 이해구 ABSTRACT 논문에서는 표면 마감 동작을 새로운 표면에작업의 질을 떨어트리지 않고 적용하는 방법에 대해서 설명한다. 기본 아이디어는 사람이 먼저 표면 마감을 위한 그라인딩 작업을 평면에 보여주면, 새로운 기하학적 표면에 동일한 그라인딩 동작을 생성하는 것을 목적으로 한다. 사람의 MRR(Material removal rate)을 제한하는 것으로 ..
 [임피던스 제어] 상호작용 컨트롤(1)
[임피던스 제어] 상호작용 컨트롤(1)
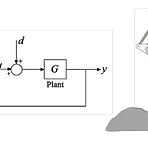
외란억제로서 상호작용 (Interaction as Disturbance Rejection) 다양한 제어이론들이 특징이 잘 설명되어 있지 않은 인터페이스를 다룰 수 있도록 발전해왔다. 외란 억제 방법을 통해서 환경에 대한 다이나믹스가 외란힘으로 추가될 수 있다. 억제를 잘하기 위해서는 외란 힘의 경계값을 잘 정해줘야한다. 하지만 로봇이 환경과 상호작용하는 경우에 외란힘은 로봇의 수용량을 넘거나 동일한 경우가 대부분이다. 예를 들어 운동학적(Kinematic) 제약은 로봇의 행동에 따라 큰 힘을 만들 수 있는데, 외란힘(환경이 주는 힘)은 로봇의 상태와 연관이 있는 데 일반적으로 외란은 상태와 독립적으로 보기 때문에 상호작용을 외란억제 문제로 보는 것은 그렇게 좋지는 않다(not seem promising)..