
 [임피던스 제어] 임피던스 제어란?(1)
[임피던스 제어] 임피던스 제어란?(1)
임피던스 제어란 힘과 위치에 대한 동적 제어와 관련이 있다. 주로 로봇팔에 작용하는 힘에 대해 고려해야하는 환경에 있을 때 적용 되는 제어이다. 기계적인 임피던스는 모션 인풋에 대한 힘의 아웃풋인데 당연하게도 이는 전류 인풋에 대한 전압 아웃풋의 비를 가지는 전기적 임피던스와 상사를 가진다. 그렇다면 먼저 전기 임피던스(electircal impedence)에 대해서 알아보자. 임피던스의 정의는 "전압을 인가했을 때 전류가 흐르는 것에 반항하는 정도" 이다. 저항과의 차이점은 저항은 DC전압, 임피던스는 AC전압이 들어올 때 저항하는 것을 말한다. 이런 차이는 그렇게 중요하지는 않고, 이 정의를 바탕으로 힘, 위치로 대입해보자. 제어에서 임피던스란 "힘을 인가했을 때 모션을 방해하는 정도" 라고 표현할 ..
 [benthebear93] How Robot-Robot Interaction Affects User's Perseptions Following a Transition Between Robots
[benthebear93] How Robot-Robot Interaction Affects User's Perseptions Following a Transition Between Robots
From One to Another: How Robot-Robot Interaction Affects Users' Perceptions Following a Transition Between Robots https://ieeexplore.ieee.org/document/8673304 Abstract 다수의 로봇이 사람과 상호작용하는 경우가 많아지고 있다. 따라서 다수의 로봇이 어떤식으로 사람들에게 정보를 전달하는지가 중요해졌다. 논문에서는 3x3 mixed 디자인 스터디를 디자인하여 실험한다. 이때 고정 된 로봇이 다양한 기능이 있는 (소셜 로봇이 아닌) 모바일 로봇을 소환("원문, summoned")하여 참가자를 가이드하게 한다. 참가자는 3가지의 로봇-로봇 인터랙션을 경험하게 되는데 1. repres..
 [benthebear93]Crawler Robots for Drilling and Fastener Installation : An Innovative Breakthrough in Aerospace Automation 리뷰
[benthebear93]Crawler Robots for Drilling and Fastener Installation : An Innovative Breakthrough in Aerospace Automation 리뷰
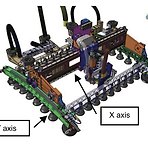
https://www.researchgate.net/publication/296651066_Crawler_Robots_for_Drilling_and_Fastener_Installation_An_Innovative_Breakthrough_in_Aerospace_Automation 불러오는 중입니다... 과거(2008)에 이루어졌던 연구 내용으로, 3개의 회사들이 모바일 가공 로봇을 목표로 제작한 로봇에 대한 리뷰이다. 기본적으로 모바일(Crawler 형태)를 채택하였지만 만족해야 하는 조건들이 있었다. 1. Orbit과 longitudinal junction에서 드릴링과 패스닝이 가능해야한다. 단, 거대한 고정장치 사용은 불가한다. 2. 다양한 곡면에서의 다양한 목적(드릴링, 패스닝, NDT 등)을 수행할..
 Motion planning - 2. 개념
Motion planning - 2. 개념
오늘은 모션 플래닝의 용어들을 간단한 개념을 곁들여서 알아보자. 저번 시간에 얘기했듯이 모션플래닝은 로봇이 어디부터 어디까지 가고싶다는 추상적인 명령을 인풋으로 받아들였을때, 어떻게 갈 것인지 로봇의 동작을 자동으로 생성하는 알고리즘이다. 예를 들면, 내방에가서 노트북좀 가져다 줘 라는 명령을 로봇에게 내렸을 때(추상적 명령) 그것을 수행하기 위해 로봇은 각 관절을 어떤식으로 움직여서 장애물을 회피하며 임무를 수행할 지 계획을 만들어야한다. 이제 모션플래닝에 대한 공부를 하기전에 필요한 개념과 용어들을 알아보자. 1. 개념 가장 기본적인 motion planning 문제는 시작상태(start configuration)인 S에서부터 목표 상태(goal configuration)인 G지점 까지 이미 알고있는..